



一種用于儲(chǔ)油罐底板缺陷自動(dòng)化檢測(cè)裝置設(shè)計(jì)
來源:《管道保護(hù)》雜志 作者:王明波1,王維斌2,曾啟科3 時(shí)間:2018-7-3 閱讀:
王明波1,王維斌2,曾啟科3
1、西南管道蘭州輸油氣分公司
2、中國(guó)石油管道科技研究中心
3、川慶鉆探工程公司油建公司
儲(chǔ)罐是存儲(chǔ)原油、成品油、石化產(chǎn)品和原料的重要設(shè)備。隨著儲(chǔ)罐的大量建造和使用,儲(chǔ)罐安全運(yùn)行的重要性也日益凸顯。儲(chǔ)罐的安全隱患主要是儲(chǔ)罐的腐蝕,特別是罐底板腐蝕以及由此造成的泄漏。儲(chǔ)罐一旦發(fā)生問題,將會(huì)造成嚴(yán)重的經(jīng)濟(jì)損失和環(huán)境污染,甚至釀成嚴(yán)重的生產(chǎn)事故,直接危害人的生命安全。為保證儲(chǔ)罐的安全運(yùn)行,許多國(guó)家都制定了相應(yīng)的行業(yè)標(biāo)準(zhǔn)或國(guó)家標(biāo)準(zhǔn),規(guī)定儲(chǔ)罐底板的檢測(cè)是儲(chǔ)罐檢測(cè)中的一項(xiàng)必需內(nèi)容[1]。
常用在儲(chǔ)油罐底板缺陷檢測(cè)的技術(shù)有:超聲導(dǎo)波檢測(cè)、漏磁檢測(cè)、磁致伸縮、 C-掃描[2-3]等。常規(guī)檢測(cè)技術(shù)效率低、成本高,需要進(jìn)行離線、開罐檢測(cè),且檢測(cè)前儲(chǔ)油罐都必須清空、清潔。不但費(fèi)時(shí)費(fèi)力,而且成本很高。超聲導(dǎo)波檢測(cè)技術(shù)可以對(duì)儲(chǔ)油罐實(shí)施在線檢測(cè),并且檢測(cè)時(shí)不要求對(duì)儲(chǔ)油罐進(jìn)行清空和清潔。該技術(shù)可以對(duì)底板進(jìn)行100%的直接評(píng)估[4],非常適合于儲(chǔ)罐底板和罐壁的在線無損檢測(cè)。
1 儲(chǔ)油罐底板缺陷檢測(cè)現(xiàn)狀
在儲(chǔ)罐底板缺陷的平板導(dǎo)波檢測(cè)應(yīng)用中,存在檢測(cè)效率低的突出問題,主要原因是傳感器的掃描方式不夠高效,往往采取人工移動(dòng)的方式,非連續(xù)自動(dòng)行進(jìn)方式。即每完成一段距離的底板檢測(cè),人工拆除外邊緣上的傳感器換新的檢測(cè)點(diǎn),在拆卸過程中容易損壞傳感器。從而大大降低了超聲導(dǎo)波檢測(cè)的效率。為了應(yīng)對(duì)這一問題,多傳感器的方式常被采用。但是,多傳感器的方式并不能實(shí)質(zhì)性解決檢測(cè)效率低的問題,只能在 一定程度上緩解[5-7],原因是:首先,多傳感器的方式仍然需要人工布置并移動(dòng)傳感器,沒有減輕檢測(cè)人員的工作負(fù)擔(dān),隨著儲(chǔ)罐的大型化,檢測(cè)人員的勞動(dòng)強(qiáng)度將大幅增加;其次,多傳感器的檢測(cè)方式需要檢測(cè)儀器具備較多數(shù)量的信號(hào)通道,增加了檢測(cè)成本,不利于技術(shù)的應(yīng)用推廣。
因此,本文設(shè)計(jì)了一種儲(chǔ)罐檢測(cè)自動(dòng)化裝置,它主要由運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)和機(jī)電控制系統(tǒng)兩部分組成。該裝置能實(shí)現(xiàn)連續(xù)檢測(cè)、傳感器角度可自適應(yīng)調(diào)整、行走速度可控制。從而達(dá)到提高檢測(cè)效率,降低檢測(cè)成本的目的。
2 運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)設(shè)計(jì)
儲(chǔ)罐底板自動(dòng)化檢測(cè)裝置的運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)主要是實(shí)現(xiàn)對(duì)檢測(cè)傳感器的夾持;并使其在檢測(cè)過程中與儲(chǔ)罐邊緣板能有良好的接觸;通過永磁鐵吸附在儲(chǔ)罐壁上,隨著電機(jī)的驅(qū)動(dòng)使整個(gè)裝置沿著儲(chǔ)罐邊緣板行進(jìn)。從而實(shí)現(xiàn)儲(chǔ)罐底板超聲導(dǎo)波連續(xù)在線檢測(cè)的過程。
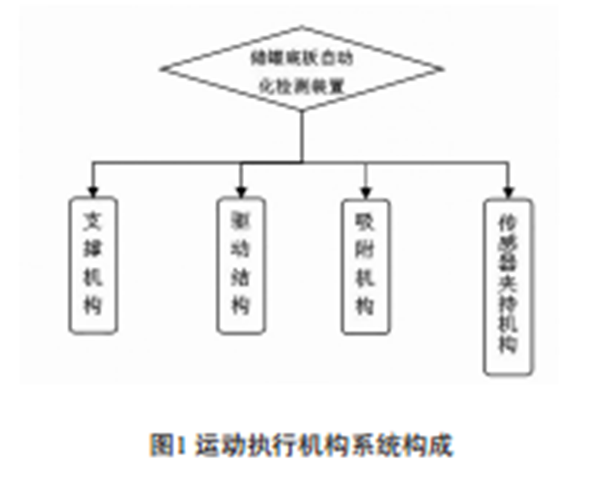
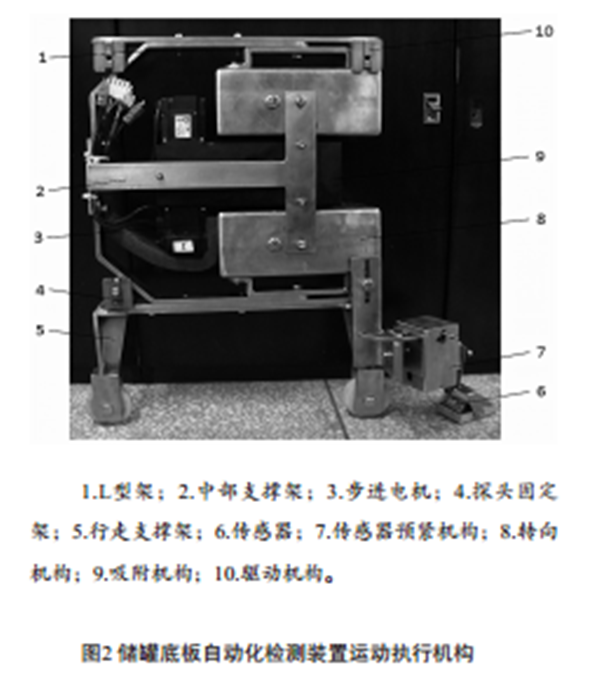
如圖1所示,儲(chǔ)罐底板自動(dòng)化檢測(cè)裝置的運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)主要由四部分組成:支撐機(jī)構(gòu)、驅(qū)動(dòng)結(jié)構(gòu)、吸附機(jī)構(gòu)、傳感器夾持機(jī)構(gòu)。支撐機(jī)構(gòu)是使驅(qū)動(dòng)機(jī)構(gòu)、吸附機(jī)構(gòu)、傳感器夾持機(jī)構(gòu)安裝在一起,并使整個(gè)機(jī)構(gòu)立在儲(chǔ)罐外邊緣板上;驅(qū)動(dòng)結(jié)構(gòu)主要由2個(gè)伺服電機(jī)、變速箱、滾輪安裝殼、齒輪傳送帶、軸承端蓋、傳送帶張緊裝置、齒輪、傳動(dòng)軸、滾動(dòng)軸承機(jī)構(gòu)、傳動(dòng)齒輪等零件組成,為整個(gè)裝置提供行走動(dòng)力;吸附機(jī)構(gòu)主要由滾動(dòng)軸承、固定套、磁輪擋圈、齒輪和8個(gè)永磁環(huán)等零件組成,它是通過永磁輪使該裝置緊緊吸附在儲(chǔ)罐外邊緣上;傳感器夾持機(jī)構(gòu)是固定傳感器,并使傳感器能在0°~10°范圍內(nèi)自動(dòng)根據(jù)儲(chǔ)罐外邊緣板情況調(diào)整傾斜角度,提供給傳感器一定的壓緊力,調(diào)整傳感器信號(hào)發(fā)射方向。根據(jù)以上設(shè)計(jì)要求,加工制作出了儲(chǔ)罐底板自動(dòng)化檢測(cè)裝置運(yùn)動(dòng)機(jī)構(gòu),如圖2所示。
3 機(jī)電控制系統(tǒng)設(shè)計(jì)
3.1 系統(tǒng)構(gòu)成
機(jī)電控制系統(tǒng)主要是通過機(jī)電控制箱實(shí)現(xiàn)對(duì)運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)中安裝的兩個(gè)私服電機(jī)進(jìn)行供電、速度控制和過載保護(hù)。機(jī)電控制箱面板上設(shè)置有控制電機(jī)正反轉(zhuǎn)按鈕、電源開關(guān)按鈕、兩個(gè)固定速度按鈕、兩個(gè)電機(jī)報(bào)警復(fù)位開關(guān)按鈕、電機(jī)無級(jí)調(diào)速器、電機(jī)轉(zhuǎn)速顯示器和相關(guān)指示燈等器件,如圖3所示。

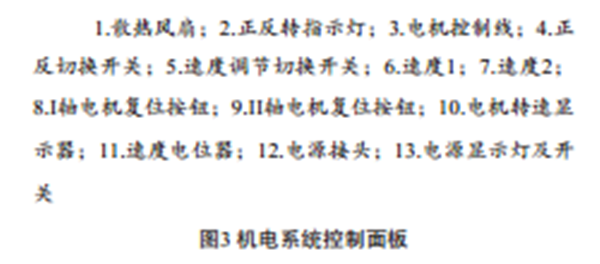
本機(jī)電控制系統(tǒng)設(shè)計(jì)了兩種電機(jī)調(diào)速方式,一種是根據(jù)檢測(cè)系統(tǒng)信號(hào)識(shí)別速度設(shè)定了三個(gè)固定電機(jī)轉(zhuǎn)速,通過調(diào)節(jié)速度1、速度2按鈕實(shí)現(xiàn)。當(dāng)單獨(dú)按下速度1、速度2按鈕時(shí)為兩個(gè)設(shè)定速度,當(dāng)同時(shí)按下兩個(gè)按鈕時(shí)為第三個(gè)設(shè)定速度。經(jīng)過計(jì)算,把三個(gè)電機(jī)轉(zhuǎn)速分別設(shè)定為100轉(zhuǎn)/分、200轉(zhuǎn)/分、300轉(zhuǎn)/分,從而實(shí)現(xiàn)檢測(cè)機(jī)構(gòu)的行走速度在0.5mm/s-4mm/s之間。該方法的優(yōu)點(diǎn)是速度恒定、操作簡(jiǎn)單;缺點(diǎn)是速度單一。另一種速度調(diào)節(jié)方式是通過速度電位器來改變電機(jī)電壓,從而實(shí)現(xiàn)電機(jī)從低到高的無級(jí)調(diào)速。這種方式的優(yōu)點(diǎn)是可以在很大范圍內(nèi)實(shí)現(xiàn)對(duì)電機(jī)速度調(diào)節(jié),適應(yīng)更多的工況;缺點(diǎn)是調(diào)節(jié)的速度不精確,容易出現(xiàn)速度跳躍。在控制面板上設(shè)置了這兩種電機(jī)速度調(diào)節(jié)方式的切換開關(guān)。
系統(tǒng)中的兩個(gè)伺服電機(jī)采用兩個(gè)驅(qū)動(dòng)器單獨(dú)控制,對(duì)驅(qū)動(dòng)器設(shè)置了同步性,從而使兩伺服電機(jī)轉(zhuǎn)速相同。兩電機(jī)擁有獨(dú)立電源線和控制線,控制箱上的I軸、II軸連接線分別與運(yùn)動(dòng)機(jī)構(gòu)中的I、II號(hào)伺服電機(jī)相連接。可以通過控制面板上的正反轉(zhuǎn)切換開關(guān)改變檢測(cè)裝置的行走方向。由于檢測(cè)裝置在檢測(cè)過程中可能遇到無法逾越的障礙物,造成裝置停止不動(dòng),使電機(jī)卡住而不能轉(zhuǎn)動(dòng),電流會(huì)增大,甚至燒壞電機(jī)。因此設(shè)計(jì)了過載保護(hù)電路,對(duì)電機(jī)過載后的恢復(fù)工作分別設(shè)計(jì)了兩個(gè)復(fù)位開關(guān)。
3.2 初始參數(shù)設(shè)置
在設(shè)計(jì)機(jī)電控制系統(tǒng)三個(gè)設(shè)定速度時(shí),需要對(duì)電機(jī)進(jìn)行在線調(diào)試。該伺服電機(jī)可以通過sigmawin+專業(yè)軟件對(duì)其進(jìn)行在線參數(shù)調(diào)節(jié)[8]。如圖4所示為sigmawin+操作界面。用數(shù)據(jù)線和電源線把電機(jī)與驅(qū)動(dòng)器相連接,再用USB數(shù)據(jù)線把電腦與驅(qū)動(dòng)器相連,然后啟動(dòng)sigmawin+軟件,就可以對(duì)伺服電機(jī)進(jìn)行在線調(diào)試。如圖5所示。
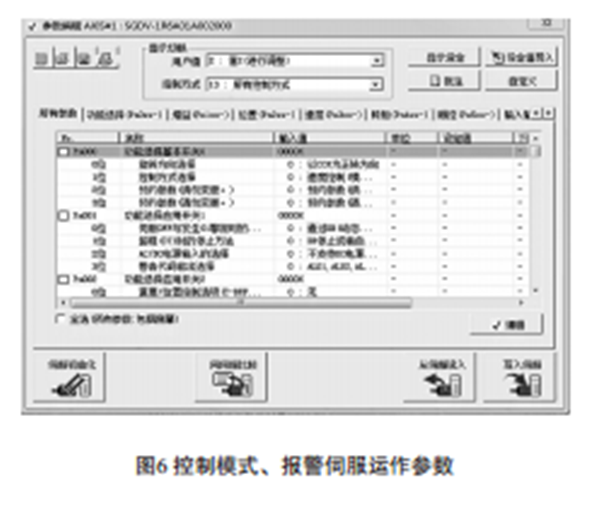
通過sigmawin+軟件可以實(shí)現(xiàn)對(duì)伺服電機(jī)的控制模式選擇(位置,速度, 轉(zhuǎn)矩控制)、機(jī)能使用、不使用設(shè)定、報(bào)警時(shí)的伺服運(yùn)作、電機(jī)回轉(zhuǎn)方向的設(shè)定、I/O信號(hào)的開斷、各種增益、位置決定單位、速度、及轉(zhuǎn)矩指令、信號(hào)、點(diǎn)動(dòng)速度、有關(guān)轉(zhuǎn)矩速度的參數(shù)、連續(xù)參數(shù)等參數(shù)的設(shè)置。在這里對(duì)控制模式、內(nèi)部設(shè)定速度、報(bào)警時(shí)的伺服運(yùn)作進(jìn)行了相應(yīng)設(shè)定,其他參數(shù)采用默認(rèn)值。如圖6、圖7所示。

4 總結(jié)
儲(chǔ)罐底板自動(dòng)化檢測(cè)裝置具有如下特點(diǎn):
(1)本傳感器攜帶裝置應(yīng)用針對(duì)性強(qiáng),適合立式儲(chǔ)罐底板缺陷的超聲導(dǎo)波在線檢測(cè),同時(shí)也可以攜帶超聲測(cè)厚傳感器實(shí)現(xiàn)外邊緣板的超聲掃描測(cè)厚;
(2)本傳感器攜帶裝置可自適應(yīng)儲(chǔ)罐外邊緣板表面的起伏變化,不受儲(chǔ)罐外邊緣板輕微形變及腐蝕造成的表面不平整因素的影響;
(3)本傳感器攜帶裝置工作效率高,可實(shí)現(xiàn)檢測(cè)傳感器的連續(xù)運(yùn)動(dòng),檢測(cè)期間不需要人工干預(yù)傳感器的運(yùn)動(dòng);
(4)本傳感器攜帶裝置擴(kuò)展性強(qiáng),可去掉傳感器容器卡座和傳感器容腔,直接在傳感器固定 機(jī)構(gòu)上安裝帶有特定外封裝的傳感器,如攜帶多個(gè)檢測(cè)傳感器的相控陣檢測(cè)技術(shù)。從而實(shí)現(xiàn)了一機(jī)多用的目的。 ◢
參考文獻(xiàn)
[1] 劉廣文,陳次昌.立式儲(chǔ)罐在線檢測(cè)技術(shù)與研究進(jìn)展[J].油氣儲(chǔ)運(yùn),2009,28(9):1-4.
[2] 中國(guó)石油管道公司. 油氣管道檢測(cè)與修復(fù)技術(shù)[M].北京: 石油工業(yè)出版社, 2010.
[3] 劉鎮(zhèn)清.超聲無損檢測(cè)中的導(dǎo)波技術(shù)[J].無損檢測(cè),1999,21(8):367-375.
[4] Y.C.Jung,T.Kundu and M.Ehsani,Internaldiscontinuity detection in concrete by Lamb waves,MarerialsEvaluation,418-423,2001.
[5] 劉貴民主編. 無損檢測(cè)技術(shù)[M]. 北京: 國(guó)防工業(yè)出版社, 2006.
[6] 肖賢軍, 劉麗川, 劉子厚, 等. 超聲導(dǎo)波技術(shù)檢測(cè)儲(chǔ)罐底板缺陷[J]. 無損檢測(cè), 2008, 30(1): 6-8.
[7] 康葉偉, 林明春, 王維斌, 等. 立式儲(chǔ)罐底板在線檢測(cè)技術(shù)國(guó)內(nèi)外動(dòng)態(tài)[J]. 無損檢測(cè), 2010 (9): 725-729.
[8] 章晶. 實(shí)現(xiàn)多軸數(shù)控高性能加工的控制方法研究[D]. 廣東工業(yè)大學(xué), 2013.
(作者:王明波,助理工程師, 2013年畢業(yè)于西南石油大學(xué)機(jī)械制造及自動(dòng)化專業(yè)碩士研究生,現(xiàn)主要從事長(zhǎng)輸管道設(shè)備與工藝管理。
2014年第4期(總第17期)
上篇:
下篇:
 甘公網(wǎng)安備 62010202003034號(hào)
甘公網(wǎng)安備 62010202003034號(hào) 
