



無人機(jī)應(yīng)用于油氣 長輸管道保護(hù)前景廣闊
來源:《管道保護(hù)》雜志 作者:李曉彤 時(shí)間:2019-3-25 閱讀:
第二講 無人機(jī)管道巡檢系統(tǒng)是如何進(jìn)行數(shù)據(jù)分析的

上期科普講座向大家介紹了無人機(jī)管道巡線系統(tǒng)方案,概況講就是一個(gè)核心:地理信息系統(tǒng);二個(gè)管理:管理人和設(shè)備;三個(gè)保證:無人機(jī)培訓(xùn),無人機(jī)保險(xiǎn),無人機(jī)空域申請;四個(gè)層次:數(shù)據(jù)采集,數(shù)據(jù)存儲(chǔ),數(shù)據(jù)分析,數(shù)據(jù)展示。在這套方案中,最核心的就是數(shù)據(jù)分析。系統(tǒng)是如何將無人機(jī)采集的巡線數(shù)據(jù),進(jìn)行分析比對的,它是靠什么技術(shù)實(shí)現(xiàn)的?
1 9 8 1年的諾貝爾醫(yī)學(xué)獎(jiǎng),頒發(fā)給了 D a v i dHubel(出生于加拿大的美國神經(jīng)生物學(xué)家) 和TorstenWiesel,以及 Roger Sperry。前兩位的主要貢獻(xiàn),是“發(fā)現(xiàn)了視覺系統(tǒng)的信息處理”,可視皮層是分級的。根據(jù)人類這個(gè)特點(diǎn),構(gòu)造多層的神經(jīng)網(wǎng)絡(luò),較低層的識(shí)別初級的圖像特征,若干底層特征組成更上一層特征,通過多個(gè)層級的組合,最終在頂層做出分類,這就是許多深度學(xué)習(xí)算法的靈感來源。今天我們介紹的就是根據(jù)這一靈感來源開發(fā)的,基于卷積神經(jīng)網(wǎng)絡(luò)技術(shù)對無人機(jī)采集的管線數(shù)據(jù)進(jìn)行數(shù)據(jù)分析的手段。
首先卷積神經(jīng)網(wǎng)絡(luò)算法是基于“YOLO(YouOnly Look Once)”項(xiàng)目進(jìn)行卷積層重新組合設(shè)計(jì),這樣可以將整個(gè)圖像由神經(jīng)網(wǎng)絡(luò)進(jìn)行評估,提高檢測準(zhǔn)確率及效率。其次向卷積神經(jīng)網(wǎng)絡(luò)輸入無人機(jī)遙感影像,并對無人機(jī)遙感影像進(jìn)行數(shù)據(jù)對比,分析疑似對象(圖 1)。
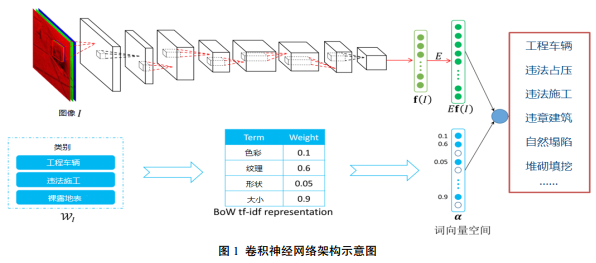
根據(jù)計(jì)算機(jī)圖像識(shí)別需要,北京道信科技有限公司目前已采集10萬多張圖形樣本。隨著時(shí)間推移,圖形樣本數(shù)量持續(xù)增加并優(yōu)化計(jì)算機(jī)識(shí)別能力。前期根據(jù)所設(shè)計(jì)的神經(jīng)網(wǎng)絡(luò),共訓(xùn)練了6類特征目標(biāo),分別為:工程車輛、地表破壞、非法占壓、溝槽開挖、土地塌陷、水土流失。
為 了 對 算 法 進(jìn) 行 更 好 地 測 試 , 搭 載 佳 能(Canon) EOS 5D Mark IV相機(jī)進(jìn)行拍攝,無人機(jī)行高為100~120 m,時(shí)速100~120 km/h,采集的數(shù)據(jù)圖像分辨率為5760×3860,地面分辨率為0.5~0.3 m。對檢測結(jié)果進(jìn)行對比分析,正樣本檢測識(shí)別準(zhǔn)確率高達(dá)96.6 %,其中誤檢率為0.8 %。
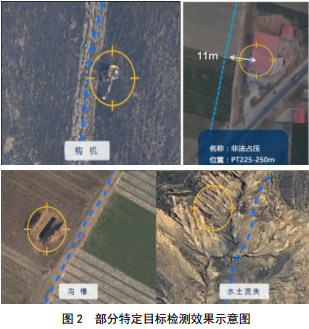
基于卷積神經(jīng)網(wǎng)絡(luò)的無人機(jī)油氣管線巡檢系統(tǒng)可以實(shí)現(xiàn)實(shí)時(shí)影像檢測,效果如圖 2所示。前期針對非法占壓、工程車輛、溝槽開挖、動(dòng)土痕跡、鉤機(jī)、鏟機(jī)、地表破壞、水土流失等特征進(jìn)行自動(dòng)識(shí)別檢測,并自動(dòng)出具報(bào)表和統(tǒng)計(jì)分析。及時(shí)發(fā)現(xiàn)和定位違法及安全隱患點(diǎn),及時(shí)處理推送執(zhí)法信息,做到防患于未然,實(shí)現(xiàn)采用自主航跡規(guī)劃巡視的巡檢方式,高效安全地執(zhí)行巡檢任務(wù)。
主講人:李曉彤,北京道信科技有限公司總經(jīng)理。
上篇:
下篇:
 甘公網(wǎng)安備 62010202003034號(hào)
甘公網(wǎng)安備 62010202003034號(hào) 
