



“無人化”趨勢下油氣管道管理和建設(shè)展望
來源:《管道保護(hù)》2021年第4期 作者:錢建華 沈建鋒 杜威 陳子超 時間:2021-8-4 閱讀:
錢建華 沈建鋒 杜威 陳子超
國家管網(wǎng)集團(tuán)華東分公司
摘要:我國油氣管道建設(shè)與運(yùn)營以中俄東線天然氣管道試點項目為標(biāo)志進(jìn)入了智能化階段。通過闡述當(dāng)前“無人化”管理相關(guān)支撐技術(shù)的發(fā)展?fàn)顩r,剖析管道和站場設(shè)施完整性管理的難點,初步探索油氣管線無人化運(yùn)維的場景和方法,為無人化設(shè)施建設(shè)和常態(tài)化運(yùn)行提供參考。
關(guān)鍵詞:油氣管道;無人化;智能化;多技術(shù)融合
預(yù)期至2025年,國內(nèi)油氣管網(wǎng)總規(guī)模將達(dá)到24萬公里。隨著管網(wǎng)里程的急速增長,為實現(xiàn)安全管理和智能管控的同步升級,“無人化”技術(shù)逐步成為管道和站場管理的應(yīng)用趨勢。無人化也成為融合切合應(yīng)用場景支撐技術(shù)、推動生產(chǎn)方式轉(zhuǎn)型的持續(xù)不斷的迭代升級過程。
1 無人化的背景
1.1 行業(yè)背景
目前,管道資產(chǎn)完整性管理指標(biāo)日趨嚴(yán)苛,從表 1所列控制指標(biāo)可見一斑。
表 1 管道資產(chǎn)完整性管理業(yè)務(wù)指標(biāo)
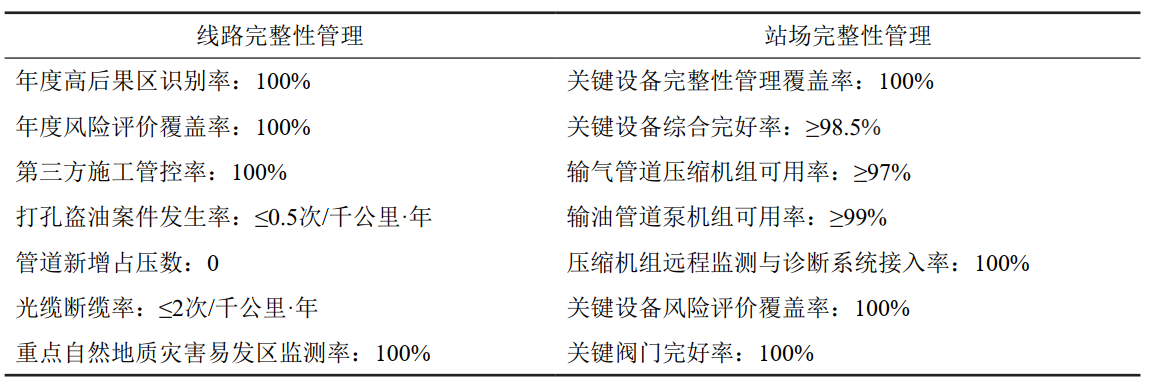
實現(xiàn)資產(chǎn)完整性管理,需要更高的巡檢頻次和巡檢質(zhì)量,對當(dāng)前以人工作業(yè)為主的巡檢方式提出巨大挑戰(zhàn)。
1.2 技術(shù)背景
先進(jìn)傳感技術(shù)、目標(biāo)/行為識別算法、高精度定位技術(shù)、數(shù)字孿生支撐下的復(fù)雜控制技術(shù),大大降低了無人化作業(yè)的空間限制,提升了作業(yè)環(huán)境適應(yīng)性。為管道和站場無人化作業(yè)創(chuàng)造了技術(shù)條件。目前技術(shù)的更新發(fā)展已經(jīng)在應(yīng)用關(guān)鍵節(jié)點取得了以下突破。
(1)看得清、看得懂。先進(jìn)傳感器技術(shù)提升了無人化裝備的環(huán)境感知范圍和精度,目標(biāo)/行為檢測算法、檢測量變化模式分析算法,使其具備了適應(yīng)泛化作業(yè)對象和隨機(jī)作業(yè)環(huán)境的技術(shù)。
(2)行得準(zhǔn)。高精度定位技術(shù)為遠(yuǎn)程精準(zhǔn)操控?zé)o人裝備提供了技術(shù)基礎(chǔ),而對歷史操作的精準(zhǔn)重復(fù)則大大降低了遠(yuǎn)程操控的人工投入,并為自動感知操作對象的狀態(tài)變化提供了便利。
(3)想得全。數(shù)字孿生是以作業(yè)對象及其運(yùn)行過程為中心,融入規(guī)律、規(guī)則、流程,綜合運(yùn)用仿真、大數(shù)據(jù)、人工智能技術(shù),構(gòu)建在形態(tài)和運(yùn)行機(jī)制上全面模擬實體的數(shù)字孿生體。
(4)網(wǎng)絡(luò)配。5G移動網(wǎng)絡(luò)超高帶寬、超低延時的特性與工業(yè)控制對網(wǎng)絡(luò)的要求相匹配,為無人裝備的野外作業(yè)提供了通信保障。
1.3 生產(chǎn)方式轉(zhuǎn)型
以新技術(shù)、新式勞動工具替代人工作業(yè)方式下的部分操作過程,吸收人工操作規(guī)范、操作經(jīng)驗,以流程、規(guī)則形式固化于無人裝備的應(yīng)用程序和數(shù)據(jù)庫中;勞動者則由現(xiàn)場操作轉(zhuǎn)為遠(yuǎn)程監(jiān)視和控制。在例行性、環(huán)境條件依賴性低的操作中,有條件實現(xiàn)無人裝備的自主運(yùn)行;在智能輔助決策工具的協(xié)助下,遠(yuǎn)程人工控制則會簡化為設(shè)定作業(yè)目標(biāo)和選擇無人裝備反饋的分支操作選項。實現(xiàn)生產(chǎn)方式由勞動密集型、技術(shù)密集型向決策密集型轉(zhuǎn)變(圖 1)。
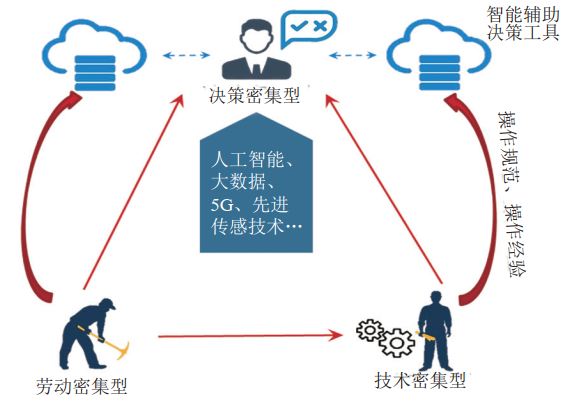
圖 1 生產(chǎn)方式轉(zhuǎn)型關(guān)系圖
2 無人化管控平臺建設(shè)
2.1 無人化技術(shù)應(yīng)用
2.1.1 工程建設(shè)
(1) 地形勘察。無人機(jī)傾斜攝影獲得精準(zhǔn)三維地表模型,用于評估工地現(xiàn)場及周邊情況。周期性的地理信息采集也可用于發(fā)現(xiàn)緩慢地址變化對已建成管線、場站的潛在威脅。相對于衛(wèi)星遙感測繪,使用無人機(jī)獲得地理信息數(shù)據(jù)更為經(jīng)濟(jì)、精細(xì)且不受氣象和衛(wèi)星運(yùn)行位置影響。
(2)工程質(zhì)量遠(yuǎn)程監(jiān)察。根據(jù)在建工程的數(shù)字孿生體/BIM選取關(guān)注位置生成無人機(jī)航線,定點采集工程三維影像,并與數(shù)字孿生體/BIM設(shè)計模型比對,早期發(fā)現(xiàn)和解決工程質(zhì)量問題,降低投產(chǎn)后運(yùn)維成本。
(3)無人化施工技術(shù)引入。降低人工缺陷引入,在管道中心線對齊、環(huán)焊縫焊接等關(guān)鍵環(huán)節(jié)提升施工質(zhì)量。
2.1.2 線路管理
(1)管線局部區(qū)段常態(tài)化巡檢。通過無人機(jī)巡線,自主識別管道外腐蝕、地質(zhì)變化、占壓、警戒線內(nèi)施工等異常情況,實現(xiàn)無需人工參與的常態(tài)化低成本巡檢,單架無人機(jī)巡檢頻次可達(dá)每日數(shù)次。無人機(jī)可提供載荷控制和遠(yuǎn)程喊話功能,便于遠(yuǎn)程取證、說服教育或警告驅(qū)離。
(2)全線高后果區(qū)識別。周期性開展200~300米高度、廣角攝影的長距離無人機(jī)巡檢,發(fā)現(xiàn)更大范圍的地理/地質(zhì)變化,彌補(bǔ)常態(tài)化無人機(jī)巡檢受空域開放高度(地面以上120米以內(nèi))限制的巡檢局限,兩者互為補(bǔ)充形成巡檢“精”與“泛”、“窄”與“寬”、“高頻”與“低頻”,以全面及時識別高后果區(qū)變化情況。
2.1.3 場站管理
(1)站場及閥室設(shè)備遠(yuǎn)程監(jiān)視及控制。基于物聯(lián)網(wǎng)技術(shù)的遠(yuǎn)程操控對站場閥室設(shè)備進(jìn)行遠(yuǎn)程操控和連鎖投退。基于智能識別分析的視頻技術(shù)在站場閥室區(qū)域?qū)崿F(xiàn)邊界警戒、視頻抄表、入侵報警、作業(yè)識別等功能。
(2)站場或閥室外圍環(huán)境及設(shè)施完整性檢查。駐站旋翼無人機(jī)或經(jīng)過站場的管線巡檢旋翼無人機(jī)繞飛站場或閥室建筑整體以及重要設(shè)施,檢查建筑外結(jié)構(gòu)缺陷、設(shè)施缺陷,周邊環(huán)境威脅。
2.1.4 應(yīng)急處置
(1)事故早期處置。感知事故發(fā)生時,可遠(yuǎn)程操控附近駐站無人機(jī)趕往現(xiàn)場進(jìn)行警示、疏散群眾等早期工作。
(2)現(xiàn)場態(tài)勢信息采集和展示。在事故處置過程中,可利用多無人機(jī)全方位獲取現(xiàn)場畫面,幫助應(yīng)急指揮中心了解現(xiàn)場態(tài)勢。
(3)備品備件急送。
2.2 無人作業(yè)管理平臺建設(shè)
2.2.1 數(shù)據(jù)通訊
應(yīng)用超低延時的5G移動網(wǎng)絡(luò)搭建從無人裝備到控制系統(tǒng)后臺再到遠(yuǎn)程操控的三點兩跳數(shù)據(jù)鏈路。依據(jù)實測情況,控制和遙測數(shù)據(jù)端到端傳輸時延可低至50 ms,1080 P高清視頻端到端傳輸時延可低至300 ms,與點到點視距通信鏈路性能接近。
2.2.2 無人作業(yè)管理平臺
圖 2是某無人作業(yè)管理平臺參考框架。
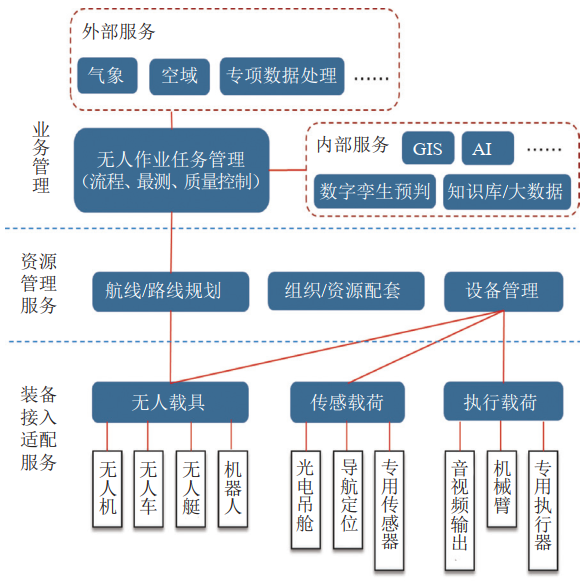
圖 2 無人作業(yè)管理平臺參考框架
(1)裝備接入層。解決不同類型無人裝備的接入問題。為簡化適配規(guī)則,將無人裝備、可替換任務(wù)載荷、獨立傳感器依據(jù)功能分解為“載具” “傳感載荷”“執(zhí)行載荷”三類,而裝備的實際物理形態(tài)則通過設(shè)備管理層進(jìn)行整合。無人裝備的接口和控制協(xié)議標(biāo)準(zhǔn)化程度越高,裝備接入適配的難度越低,運(yùn)行控制的一致性越好;在應(yīng)用條件成熟時,可考慮推動相關(guān)規(guī)范、標(biāo)準(zhǔn)的制定。
(2)資源管理層。為無人作業(yè)任務(wù)的運(yùn)行提供資源保障。資源類型包括無人裝備、參與無人作業(yè)的人員、無人作業(yè)所需的能源/耗材,以及交通和作業(yè)空間。
(3)業(yè)務(wù)管理層。實現(xiàn)對作業(yè)過程的管控以及提供各類數(shù)據(jù)服務(wù)。作業(yè)任務(wù)管理是核心,集成了不同無人作業(yè)過程的流程控制、操作執(zhí)行規(guī)則、局部和全局的質(zhì)量標(biāo)準(zhǔn)和異常狀態(tài)邊界條件等。圍繞作業(yè)任務(wù)管理,需要GIS(地理信息系統(tǒng))、人工智能分析、數(shù)字孿生預(yù)判、專業(yè)知識庫/大數(shù)據(jù)分析等內(nèi)部服務(wù)提供輔助數(shù)據(jù)支撐。業(yè)務(wù)管理層應(yīng)具備開放性,用于接入平臺尚未集成的數(shù)據(jù)服務(wù)或社會公共數(shù)據(jù)服務(wù)(如氣象、空域信息)。
2.2.3 數(shù)據(jù)操控
操控終端/交互終端的便捷性是無人作業(yè)平臺數(shù)據(jù)服務(wù)能力的外化,依作業(yè)裝備類型、參與人員角色而不同。作為參考,這里抽象出3個共性場景。
(1)便捷的數(shù)據(jù)分享與遠(yuǎn)程協(xié)作。遠(yuǎn)程操作人員可將無人裝備的運(yùn)行狀態(tài)數(shù)據(jù)和實時畫面通過專用APP、微信等通用社交工具便捷地分發(fā)到其他遠(yuǎn)程人員的計算機(jī)、手機(jī)等通用終端,隨時隨地獲得專家指導(dǎo)和遠(yuǎn)程協(xié)助。
(2)角色備份和靈活切換。遠(yuǎn)程操作人員可將無人裝備的操作權(quán)限轉(zhuǎn)移給另一操作人員,實現(xiàn)無人作業(yè)任務(wù)的執(zhí)行質(zhì)量、跨專業(yè)領(lǐng)域和跨地域的能力提升。
(3)數(shù)據(jù)匯集與綜合分析、呈現(xiàn)。將多名遠(yuǎn)程操作人員及無人裝備構(gòu)成的作業(yè)集群的多路實時數(shù)據(jù)/畫面在指控中心匯集、分析和綜合呈現(xiàn)。為復(fù)雜工程作業(yè)、應(yīng)急指揮提供全面、即時交互的技術(shù)支撐。
3 無人作業(yè)平臺案例
海上5G無人鉆井平臺建設(shè)(圖 3),旨在解決海上平臺設(shè)施/設(shè)備的完全連接,并增強(qiáng)監(jiān)視信息的采集和邊緣智能分析,在有限的衛(wèi)星通訊帶寬資源下,遠(yuǎn)程獲得全面準(zhǔn)確的平臺運(yùn)行狀況,從而減少無人機(jī)和專業(yè)技術(shù)人員的出動頻次。
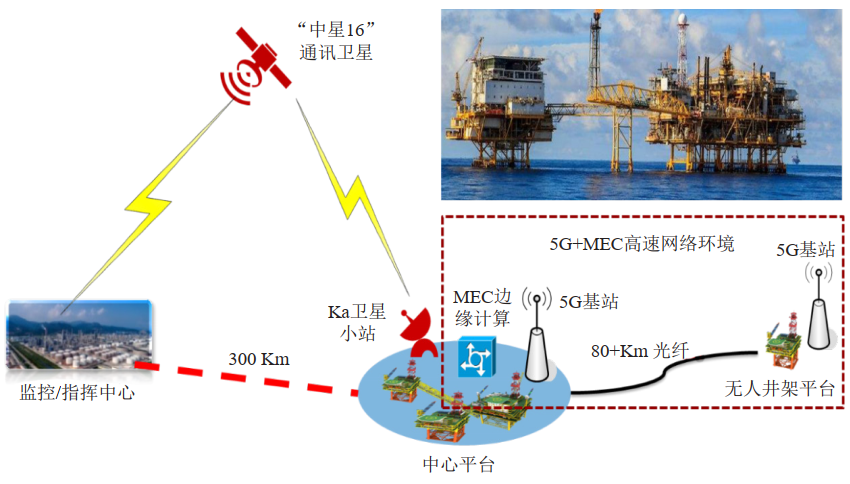
圖 3 海上5G無人鉆井平臺業(yè)務(wù)邏輯圖
試點區(qū)域由陸地監(jiān)控指揮中心、海上中心鉆井平臺和無人井架平臺組成。在中心平臺搭建5G無線局域網(wǎng),并通過海底光纜與80公里外的無人井架上的5G無線局域網(wǎng)聯(lián)通。鉆井平臺設(shè)施/設(shè)備的監(jiān)控數(shù)據(jù)匯聚于中心平臺MEC邊緣計算節(jié)點,經(jīng)過信息提取和智能診斷,抽象出實時運(yùn)行狀態(tài)報告,通過衛(wèi)星鏈路上傳給陸地監(jiān)控指揮中心。監(jiān)控指揮中心信息也可通過此通信網(wǎng)絡(luò)對海上平臺設(shè)施/設(shè)備實施遠(yuǎn)程控制。
案例中,通過衛(wèi)星中繼5G數(shù)據(jù)聯(lián)通網(wǎng)絡(luò)孤島,對穿越無人區(qū)或公用4G/5G網(wǎng)絡(luò)覆蓋不足地區(qū)的站場實現(xiàn)無人值守具有借鑒意義。
4 未來展望
4.1 無人化的迭代演進(jìn)預(yù)期
(1)第一階段:無人裝備易用化。行業(yè)對無人裝備的使用以方案驗證和小規(guī)模試點為主,自主化和功能集成度尚不高,作業(yè)現(xiàn)場不能脫離人工干預(yù)。這一階段的建設(shè)重點,是從改善易用性出發(fā),擴(kuò)大無人裝備的使用量和人工替代率,為無人裝備的規(guī)模應(yīng)用創(chuàng)造基礎(chǔ)性技術(shù)條件。
(2)第二階段:無人裝備體系化。隨著無人裝備的大量應(yīng)用,現(xiàn)場作業(yè)中比重最大的操作已由無人裝備承擔(dān),但剩余的現(xiàn)場操作卻涵蓋更多類型。這一階段的建設(shè)重點,是通過豐富無人裝備的類型、功能以及優(yōu)化無人裝備間的作業(yè)配合,以實現(xiàn)完全意義上的作業(yè)現(xiàn)場無人化,人工僅在后臺監(jiān)視和遠(yuǎn)程操控。完全(或接近完全)的無人化,放寬了作業(yè)安全要求,為作業(yè)工藝的提升開放了更大空間。
(3)第三階段:無人裝備自主化。無人裝備、常規(guī)設(shè)備乃至生產(chǎn)環(huán)境的數(shù)字孿生體已普遍建成并趨于成熟(先知期)。在數(shù)字孿生體對現(xiàn)實世界的仿真預(yù)判指導(dǎo)下,無人裝備具備較高的自主運(yùn)行能力,多數(shù)情況下,人工僅參與方案制定和決策。
4.2 展望
從實現(xiàn)無人值守,到規(guī)模化應(yīng)用實現(xiàn)“少人化”,再到完善無人裝備體系實現(xiàn)作業(yè)現(xiàn)場無人化,還須經(jīng)歷一個持續(xù)的摸索和迭代過程。
(1)借助智能化工具糅合承載流程/規(guī)范、現(xiàn)場作業(yè)經(jīng)驗、生產(chǎn)管理經(jīng)驗,需要各參與方積極協(xié)作,發(fā)揮群體智慧,挖掘需求與問題,研究解決思路,推進(jìn)方案設(shè)計、驗證和優(yōu)化。
(2)在移動網(wǎng)絡(luò)通信、數(shù)據(jù)管理、無人裝備遠(yuǎn)程操控、管道數(shù)字孿生體成熟度培育等關(guān)鍵技術(shù)領(lǐng)域取得突破;跟蹤相關(guān)技術(shù)的最新成果,識別應(yīng)用價值和積極驗證,以及借鑒其他行業(yè)先進(jìn)經(jīng)驗。
(3)在技術(shù)驗證成果積累到一定程度后,有必要制定符合油氣管道行業(yè)應(yīng)用需要的技術(shù)規(guī)范,牽引無人裝備、技術(shù)供應(yīng)商的技術(shù)改進(jìn)方向,從而達(dá)到保障應(yīng)用效果、降低規(guī)模應(yīng)用成本的目的。

作者簡介:錢建華,正高級工程師,博士研究生,現(xiàn)任國家管網(wǎng)集團(tuán)華東分公司副總經(jīng)理,先后在中國石油華東輸油管理局、中國石化集團(tuán)管道儲運(yùn)公司、中國石化股份公司管道儲運(yùn)分公司、中國石化銷售華北分公司、中國石化銷售華東分公司等單位工作。曾獲國家科技進(jìn)步獎二等獎一項、中國石油、中國石化科技進(jìn)步一等獎、二等獎和三等獎多項。聯(lián)系方式:13685199166,qjh4077@163.com。
上篇:
下篇:
 甘公網(wǎng)安備 62010202003034號
甘公網(wǎng)安備 62010202003034號 
