



沙漠環(huán)境下基于分布式光纖的管道懸空應(yīng)力實時監(jiān)測方法研究
來源:《管道保護》2021年第4期 作者:滕建強 欽沛 時間:2021-8-4 閱讀:
滕建強 欽沛
中國石油化工股份有限公司西北油田分公司
摘要:沙漠腹地流動沙丘地段,管道懸空的可能性非常高,目前缺乏管道懸空風(fēng)險的實時監(jiān)測技術(shù)。根據(jù)管—土相互作用機理,提出了一種基于分布式光纖監(jiān)測管道懸空狀態(tài)的方法,并通過模型試驗對其有效性進行驗證。結(jié)果表明:該方法能夠?qū)崟r監(jiān)測管道任意位置的縱向應(yīng)變,并根據(jù)應(yīng)變數(shù)據(jù)的分布特征準確識別管道懸空的發(fā)展變化情況,為實時監(jiān)測和科學(xué)預(yù)警提供了有效手段。
關(guān)鍵詞:沙漠地區(qū)管道;懸空;分布式光纖傳感器;實時監(jiān)測
沙漠地區(qū)管道懸空很難被及時發(fā)現(xiàn)。近年來,分布式光纖傳感技術(shù)因具有實時監(jiān)測、遠程傳感、分布式測量的優(yōu)勢,逐漸應(yīng)用于埋地和海底管道,可以在線獲得管道任意位置應(yīng)變和泄漏等在位狀態(tài)[1-5]。本文基于懸空管道的力學(xué)響應(yīng)機理,提出一種監(jiān)測沙漠管道懸空風(fēng)險的分布式光纖監(jiān)測方法,并通過模型試驗研究方法的有效性。
1 監(jiān)測方法
1.1 沙漠管道懸空監(jiān)測原理
沙漠管道在自重、覆土荷載、交通荷載等作用下,與地基土體之間將發(fā)生復(fù)雜的相互作用。為了描述管—土相互作用,最常用Winkler模型[6]。
管道一旦形成懸空(圖 1(a)),則難以利用Winkler模型獲得管道力學(xué)響應(yīng)的分析解答,但是仍然可以根據(jù)管—土相互作用的基本原理,考察懸空管道的力學(xué)行為。假設(shè)管道非懸空部分仍為彈性地基上的無限長梁,在懸空段由于土體支撐作用的喪失,管道在自重作用下發(fā)生向下的撓曲變形,撓度在懸空段中點達到最大。隨著位置向兩側(cè)土體趨近,管道撓曲變形逐漸減小。當(dāng)管道由懸空段進入兩側(cè)土體后,土體仍然向管道提供約束作用,撓曲變形進一步減小,但是由于變形協(xié)調(diào),其變形的方向?qū)l(fā)生變化,并且隨著位置逐漸遠離懸空段,反方向的撓曲變形先增加后減小,直至消失,在變形消失處形成了兩個“錨固點”,我們將懸空段兩側(cè)坡肩至錨固點的范圍定義為“轉(zhuǎn)換段”。在轉(zhuǎn)換段內(nèi),土體仍可被視作Winkler模型的土彈簧,若將該段土體約束作用離散為等間距的土彈簧,則管道懸空段和轉(zhuǎn)換段的力學(xué)模型如圖 1(b)所示,于是這三段管道便成為一個具有彈性支撐的連續(xù)梁,其邊界條件(錨固點)為簡支。根據(jù)結(jié)構(gòu)力學(xué)原理可知,懸空導(dǎo)致的附加彎矩分布如圖 1(c)。其中,錨固點以外的管道不會因懸空而產(chǎn)生附加彎矩;懸空段會在跨中形成最大正彎矩,然后向兩側(cè)逐漸減小,并且在靠近轉(zhuǎn)換段處形成負彎矩區(qū);在轉(zhuǎn)換段的起點即坡肩處,負彎矩達到最大值,形成反彎點,然后負彎矩逐漸減小,至錨固點處則完全消失。圖 1(c)所示的附加彎矩分布給出了懸空導(dǎo)致的管道應(yīng)變/應(yīng)力變化曲線,如果通過監(jiān)測獲得兩個相繼狀態(tài)的管道應(yīng)變分布曲線具有圖 1(c)的形狀,就可以判斷管道出現(xiàn)了懸空,并且可以判斷管道懸空段和轉(zhuǎn)換段的位置和長度。
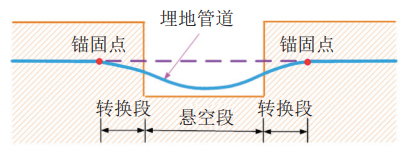
(a)埋地管道懸空變形示意圖
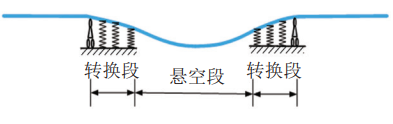
(b)懸空段和轉(zhuǎn)換段的力學(xué)模型示意圖
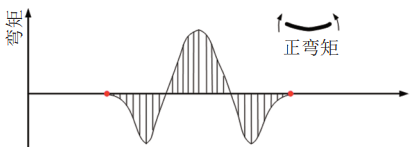
(c)埋地管道懸空附加彎矩分布示意圖
圖 1 埋地管道懸空變形與附加彎矩分布示意圖
1.2 分布式光纖監(jiān)測方法
為了驗證基于分布式應(yīng)變監(jiān)測數(shù)據(jù)的管道整體屈曲識別技術(shù)的可行性,進行管道整體屈曲監(jiān)測試驗,利用分布式應(yīng)變傳感器獲得管道前―后―屈曲過程的彎曲應(yīng)變響應(yīng),基于監(jiān)測數(shù)據(jù)重構(gòu)管道的撓曲線,并與激光全站儀監(jiān)測結(jié)果進行對比,驗證數(shù)據(jù)的可靠性。
利用大型試驗土箱進行原型管道的彎曲應(yīng)變監(jiān)測試驗,進一步探討利用分布式光纖傳感器監(jiān)測管道結(jié)構(gòu)響應(yīng)的可行性。針對流動沙丘引起的管道整體屈曲問題,提出基于分布式應(yīng)變數(shù)據(jù)的管道屈曲評價技術(shù)。
為了完整獲得管道的空間變形和應(yīng)變分布,采用平行布設(shè)方式,即在截面的12點鐘、3點鐘和9點鐘位置分別沿管道縱向布設(shè)3條Brillouin光纖應(yīng)變傳感器,如圖 2所示。
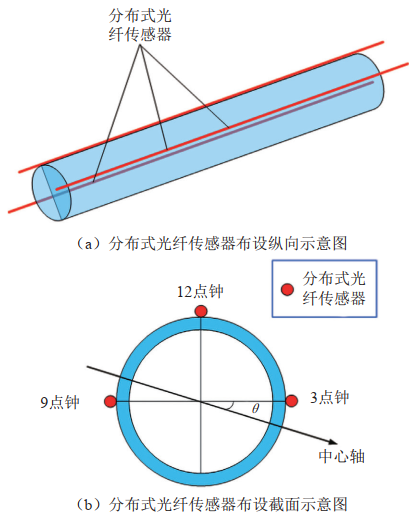
圖 2 埋地管道分布式光纖監(jiān)測方案示意圖
沿管道縱向布設(shè)的分布式光纖傳感器并不能直接得到管道的彎曲應(yīng)變,測量結(jié)果是彎曲應(yīng)變和軸向應(yīng)變疊加的結(jié)果,并且由于施工以及管道空間變形等原因,傳感器與管道中心平面之間也可能存在一定角度。針對上述問題,筆者建立了根據(jù)分布式光纖應(yīng)變監(jiān)測數(shù)據(jù)提取管道彎曲和軸向應(yīng)變的方法[7-11],具體計算公式如下:
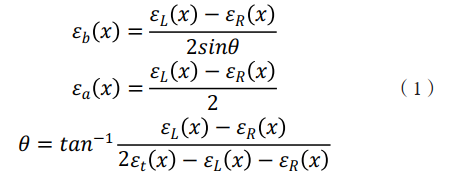
其中,χ為管道縱向的任意位置,εt(χ)、εL(χ) 和εR(χ) 分別為管道縱向χ處截面上12點鐘、9點鐘和3點鐘位置的傳感器所獲得的應(yīng)變觀測值,θ為管道中心平面與水平面的夾角,εb(χ) 和εα(χ) 分別為χ處管道的彎曲和軸向應(yīng)變。當(dāng)Brillouin光纖應(yīng)變傳感器獲得管道縱向應(yīng)變數(shù)據(jù)后,即可根據(jù)式(1)完整獲得管道的彎曲應(yīng)變和軸向應(yīng)變,進而將彎曲應(yīng)變數(shù)據(jù)根據(jù)圖 1(c)特征進行管道懸空狀態(tài)判別。
2 模型試驗
2.1 試驗過程
為了驗證監(jiān)測方法的有效性,進行了埋地管道分布式光纖監(jiān)測模型試驗。該試驗可看作是一個流動沙丘作用下管道懸空監(jiān)測的小比例原型模擬,不考慮嚴格的物理相似,僅考慮管道與土體的幾何相似,著重研究懸空形成及發(fā)展過程中管道應(yīng)變曲線的變化規(guī)律,重點考察分布式光纖傳感器是否可以監(jiān)測管道的懸空狀態(tài)。
試驗管道采用PPR管,長度為12 m,外徑為110 mm,壁厚為15.1 mm。PPR管材的彈性模量為808 MPa,密度為910 kg/m3。在幾何相似方面,以某Φ426 mm 鋼管為目標(biāo),管長和徑向幾何比尺分別設(shè)計為12和3.87。并且為了模擬管道和內(nèi)部流體的重力效應(yīng),也對管道進行了配重。
試驗在圖 3所示的大型管道試驗箱(長12 m×寬1 m×高1.7 m)內(nèi)進行,首先在試驗箱內(nèi)鋪設(shè)厚度為1 m的碎石和土體并夯實,然后鋪設(shè)30 cm厚的細沙,接著將管道平鋪在沙床上,完成傳感器布設(shè)后在試驗箱內(nèi)填埋細沙。考慮流動沙丘的情況,管道上部覆沙可能已經(jīng)減薄,因此埋深約為10 cm(表面至管頂),根據(jù)幾何比尺換算后的實際覆沙厚度約為38.7 cm。試驗中,懸空模擬是沿管道中心開挖,然后逐漸向兩側(cè)擴大,但懸跨內(nèi)懸空高度一致,僅設(shè)置為3.5 cm,根據(jù)幾何相似,實際懸空高度約為14 cm。需要說明,試驗并未考慮懸空長度和高度的極端情況,僅為驗證監(jiān)測方法的可行性。
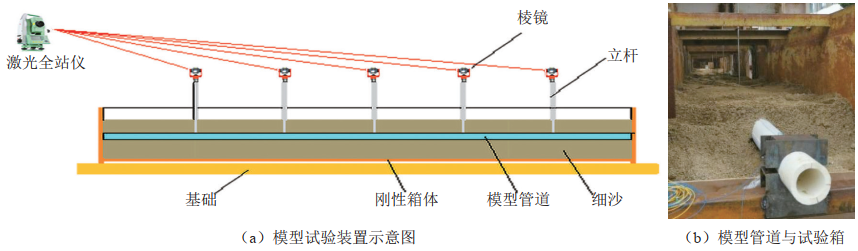
圖 3 管道懸空監(jiān)測試驗裝置
按照圖 2所示的位置將分布式光纖應(yīng)變傳感器固定在管道上,同時為了進行數(shù)據(jù)比對,在管道底部增設(shè)了1條分布式光纖應(yīng)變傳感器,共沿管道長度方向平行布設(shè)了4條分布式光纖傳感器。同時為了保證光纖監(jiān)測數(shù)據(jù)的可靠性,也在模型管道的1/6、1/3、1/2、2/3、5/6長度處,在管頂和管底分別等間距布設(shè)電阻應(yīng)變片。在這些位置上,也布置了輕質(zhì)剛性立桿,作為管道關(guān)鍵斷面的變形監(jiān)測靶點,通過激光全站儀觀測不同試驗工況下管道的變形狀態(tài)。
分布式光纖傳感器采用NBX-6050A光納儀采集數(shù)據(jù),空間分辨率設(shè)置為10 cm,距離分辨率為5 cm,形成分布式的應(yīng)變測量。電阻應(yīng)變片采用cDAQ多通道數(shù)據(jù)采集系統(tǒng)測量,應(yīng)變片為1/4橋連接。管道變形采用RTS11R6 激光全站儀測量。
試驗工況共包括8種,即以管道中點為對稱中心向兩側(cè)等長度開挖,形成管道懸空。8種工況對應(yīng)的懸空長度分別為1.00 m、1.50 m、2.00 m、2.50 m、3.00 m、3.50 m、4.00 m和4.75 m。
2.2 試驗結(jié)果分析
根據(jù)5處全站儀監(jiān)測數(shù)據(jù),將8種工況下管道的變形情況繪于圖 4。可以發(fā)現(xiàn),在前4種工況下,管道在懸空段及其附近區(qū)域出現(xiàn)了向下的撓曲變形,每種工況均為跨中撓度最大,并且隨著懸空段長度增加,撓度也呈現(xiàn)遞增趨勢,但是變形數(shù)值均較小。
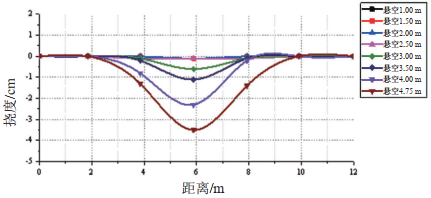
圖 4 不同懸空長度下管道撓曲變形監(jiān)測數(shù)據(jù)
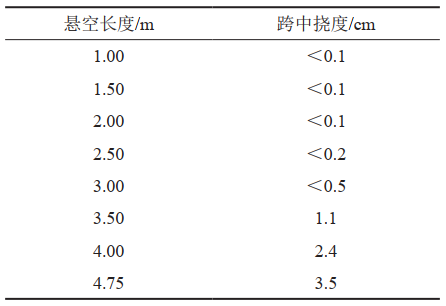
在第8種工況時,懸空長度達到4.75 m,跨中撓度達到3.5 cm,已經(jīng)觀察到管道觸底現(xiàn)象(表 1)。
表 1 懸空長度與跨中撓度關(guān)系
在每種工況下,都分別利用分布式光纖應(yīng)變傳感器和電阻應(yīng)變片,監(jiān)測懸空導(dǎo)致的管道應(yīng)變變化情況。試驗中,位于管道截面3點鐘和9點鐘的分布式應(yīng)變數(shù)據(jù)分布趨勢基本一致,并且數(shù)值都在±50 με范圍內(nèi)波動,因此認為管道軸向應(yīng)變較小,數(shù)據(jù)僅與測量誤差和試驗擾動有關(guān),限于篇幅不再列出,重點討論與彎曲應(yīng)變主導(dǎo)的管頂和管底的分布式應(yīng)變數(shù)據(jù)(圖 5)。同時,為了檢驗分布式應(yīng)變數(shù)據(jù)的可靠性,圖 5中也分別繪制了電阻應(yīng)變片的測量結(jié)果。
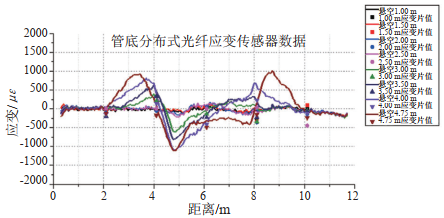
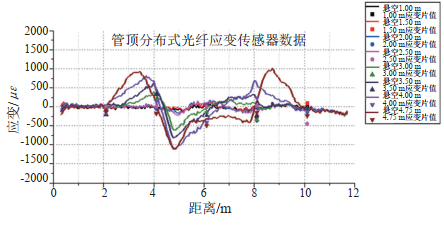
圖 5 不同懸空長度下管道分布式應(yīng)變監(jiān)測數(shù)據(jù)
圖 5顯示,在前4種工況中,無論是管頂管底的分布式應(yīng)變數(shù)據(jù)均非常小,無法明顯觀測到圖 1中的懸空特征,結(jié)合圖 4撓曲變形曲線進行分析,當(dāng)懸空長度不超過2.50 m時,管道的變形較小,相對應(yīng)的,管道的應(yīng)變響應(yīng)也應(yīng)較小,因此還無法利用分布式應(yīng)變數(shù)據(jù)判別管道懸空的出現(xiàn)。
當(dāng)懸空長度增加至3.00 m時(工況5),圖 5顯示管頂和管底的分布式應(yīng)變數(shù)據(jù)都出現(xiàn)了明顯的懸空特征,管底應(yīng)變峰值與兩側(cè)錨固點如表 2所示。
表 2 懸空管道管底應(yīng)變峰值與兩側(cè)錨固點位置
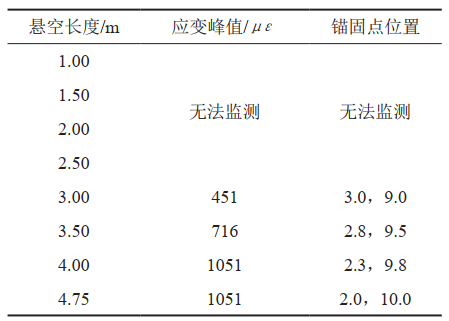
隨著懸空長度的增加,分布式應(yīng)變數(shù)據(jù)的形狀都具有清晰的懸空特征,并且懸空段的峰值應(yīng)變也明顯增加,工況8的試驗結(jié)果表明,所建立的懸空監(jiān)測方法,不但可以準確識別管道懸空的發(fā)展,而且可以有效判斷管道的觸底行為。
3 結(jié)論
根據(jù)懸空管道響應(yīng)機理,提出了一種利用分布式光纖應(yīng)變傳感器監(jiān)測懸空附加彎矩曲線的方法,建立了管道懸空的識別技術(shù)。該方法的特點是可以對管道任意位置的縱向應(yīng)變進行實時監(jiān)測,通過數(shù)據(jù)分析獲得管道懸空的發(fā)展變化情況。模型試驗結(jié)果表明:分布式光纖應(yīng)變傳感器與電阻應(yīng)變片在控制斷面的監(jiān)測數(shù)據(jù)基本吻合,說明該方法對于管道縱向應(yīng)變的監(jiān)測具有較高的可靠性,但是卻可以有效避免應(yīng)變片和光纖光柵(FBG)等點式測量技術(shù)無法對管道全長任意位置進行監(jiān)測的局限性;當(dāng)懸空導(dǎo)致管道產(chǎn)生一定的撓曲變形后(≥6 mm),分布式光纖監(jiān)測數(shù)據(jù)呈現(xiàn)典型的懸空特征,可以準確判斷管道懸空的出現(xiàn),并且根據(jù)負彎矩峰值及其消失點的位置,可以定量識別懸空長度及其影響范圍(轉(zhuǎn)換段)。分布式光纖傳感器提供了管道全長的應(yīng)變分布情況,可以實時評估管道的彎曲應(yīng)力狀態(tài),為懸空風(fēng)險導(dǎo)致的管道失效提供預(yù)警數(shù)據(jù)。
參考文獻:
[1]INAUDI D,GLISIC B. Long-range pipeline monitoring by distributed fiber optic sensing[J]. Journal of Pressure Vessel Technology,2010,132,011701-9.
[2]馮新,張宇,劉洪飛,等. 基于分布式光纖傳感器的埋地管道結(jié)構(gòu)狀態(tài)監(jiān)測方法 [J]. 油氣儲運,2017,36(11):1251-1257.
[3]劉洪飛,韓陽,馮新,等. 埋地管道微小泄漏與保溫層破壞分布式光纖監(jiān)測試驗 [J].油氣儲運,2018,37(10):1114-1120.
[4]馮新,王子豪,龔士林,等. 供熱管道應(yīng)力分布式實時監(jiān)測方法與原型試驗 [J]. 煤氣與熱力,2019,38(2):A01-A07
[5]FRINGS J,WALK T. Distributed fiber optic sensing enhances pipeline safety and security [J]. Oil Gas European Magazine,2011,37(3):132-136.
[6]Wang Y., and Moore I. D. Simplified design equations for joints in buried flexible pipes based on Hetenyi Solutions [J]. Journal of Geotechnical and Geoenvironmental Engineering, 2014, 140(4): 04013020-1-14
[7]FENG Xin, WU Wengjing,Li Xingyu, et al. Experimental investigations on detecting lateral buckling for subsea pipelines with distributed fiber optic sensors [J]. Smart Structures and Systems, 2015, 15(2), 235-248
[8]FENG Xin,WU Wengjing,MENG Dewei,et al. Distributed monitoring method for upheaval buckling in subsea pipelines with BOTDA sensors [J]. Advances in Structural Engineering,2017,20(2):180-190
[9]李興宇,盧正剛,吳文婧,等. 一種侵蝕坑作用下承插式埋地管道完整性評價方法[J]. 水利與建筑工程學(xué)報,2016,14(3):25-31
[10]張曉威,劉錦昆,陳同彥,等.基于分布式光纖傳感器的管道泄漏監(jiān)測試驗研究[J].水利與建筑工程學(xué)報,2016,14(3):1-6.
[11]武揚,吳文靜,李敬松,等. 基于分布式光纖傳感器的損傷監(jiān)測研究 [J].水利與建筑工程學(xué)報,2014,12(4):208-212+221.

作者簡介:滕建強, 1985年生,工程師,就職于中石化西北油田分公司工程技術(shù)研究院,現(xiàn)從事油田地面自動化方面研究工作。聯(lián)系方式:0991-3161530,505375146@qq.com。
上篇:
下篇:
 甘公網(wǎng)安備 62010202003034號
甘公網(wǎng)安備 62010202003034號 
